オレの右腕
オレの右腕
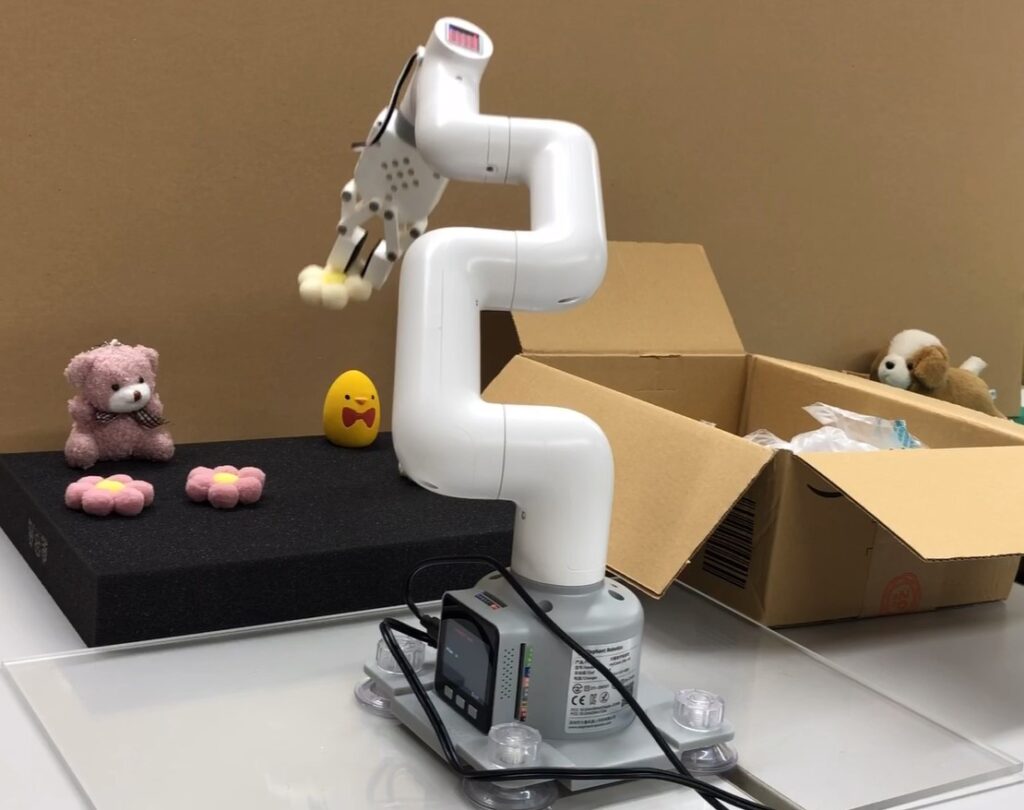
工場などに設置したロボットアームで遠隔地から操作できるようにするシステム作品です。
弊社社内の若手エンジニアによるチーム「ダンデライオンズ」によって製作され、2022年11月11日(金)に開催されたITA-DTコンテスト2022にて展示されました。
作品紹介
コンセプト
どうしても工場などでしかできない仕事を、病気やケガ、子育て等で出勤できない人や離れたところに住む人であってもできるシステムを開発することで、雇用を生み出すことを目指しました。SDGsの目標1、8、9の達成を意識しています。
ITA-DTコンテスト版
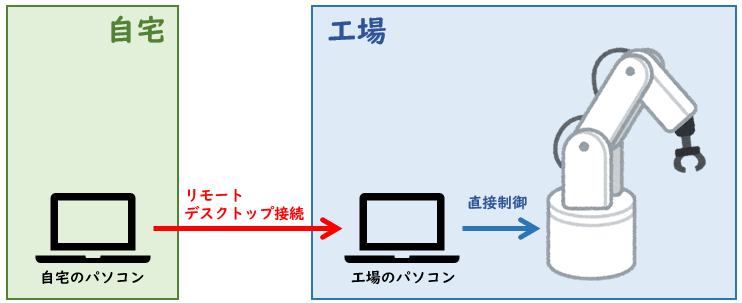
自宅のパソコンから工場のパソコンへリモートデスクトップ接続し、工場のパソコンからロボットアームを直接制御する仕組みで実演しました。
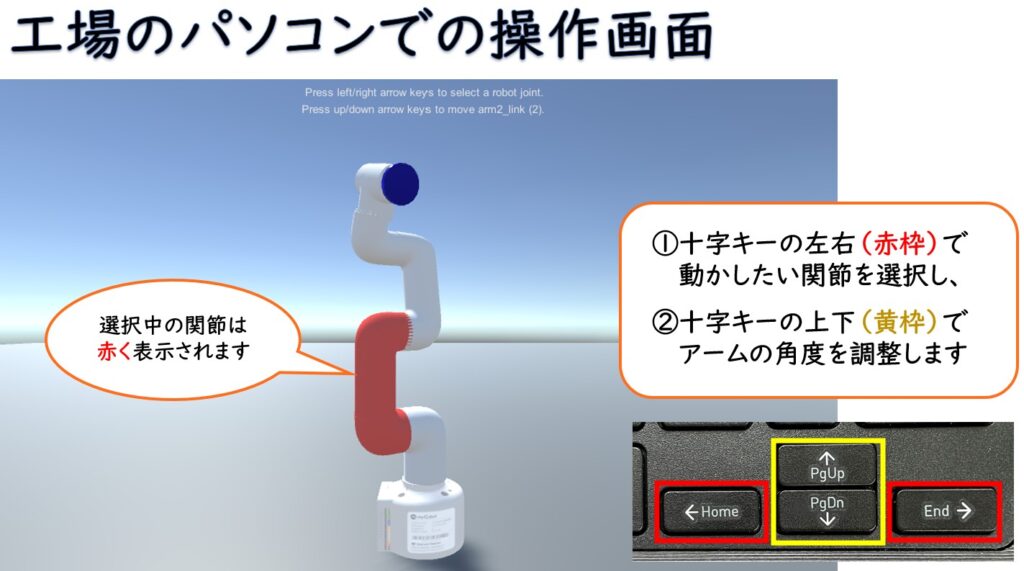
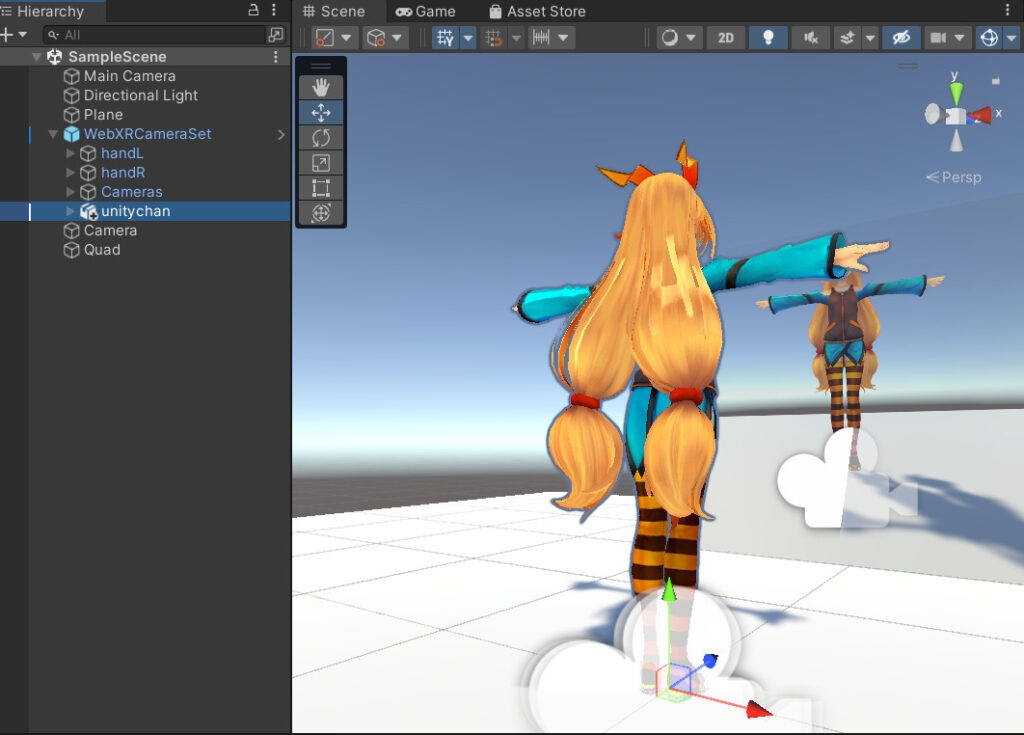
このとき工場のパソコンではロボットアームの3Dシミュレーターを起動させ、ロボットアームのどの関節をどれくらいの角度で動かすのか、なるべく直感的に制御できるように工夫しました。
シミュレーターはUnityを用いて開発されたものです。
今後の課題
- 操作性の改善
効率よく操作できるようにしつつシステムを利用できる人が増えるように、スマートデバイスによるタッチ操作や視線や音声によってロボットアームを操作できるようにしたいと考えています。 - 双方向通信
ロボットアームの動作状況を正確に把握できるようにするため、ロボットアームの触覚などを自宅にいるユーザーへフィードバックしたいと考えています。 - 通信速度の向上
ロボットアームでより複雑かつ綿密な作業を行うために、自宅と工場との間でさらに高速な通信ができる設計にしたいと考えています。
紹介動画
STYLYシーン
Ogaki Mini Maker Faire 2022〈VR会場〉向けに作品解説用のバーチャル空間を製作しました。

お問い合わせ
本作品に関心をお持ちの方、本作品を開発したメンバーへ業務を依頼したい方は、下記からお問い合わせください。